01
Base de Imagens
Coleta e anotação de 2.526 imagens (balões, aves e aviões). Após augmentation, total de 6.073 para treino/validação/teste. (YOLOv8s)
02
Detecção
Treino em Python com Ultralytics (YOLOv8) e inferência em vídeo via OpenCV para detecção em tempo real. O treinamento foi feito no Google Colab, com early stopping em 30 epoques para evitar overfitting. As métricas alcançadas foram de 94% de precisão.
03
Rastreamento & Geometria
Estimativa de altura, distância e vetores de velocidade/direção; triangulação com duas câmeras para prever a queda.
04
Atuação
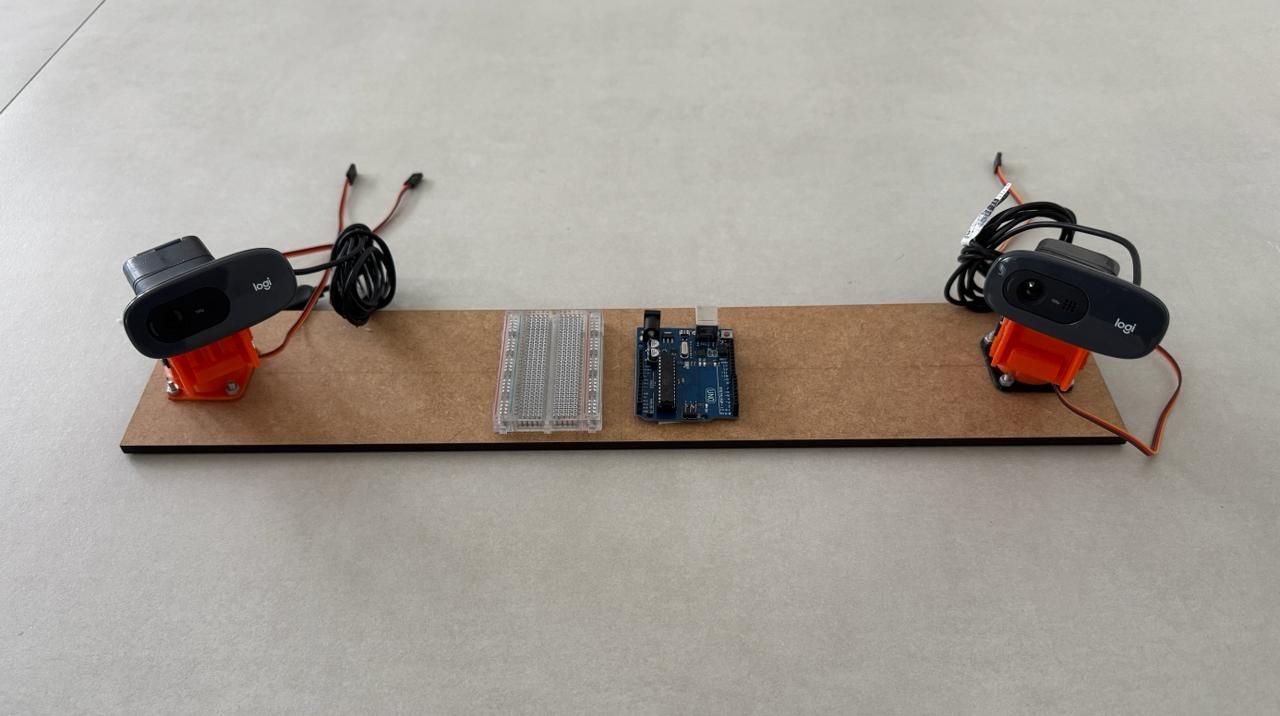
Sistema de movimentação com Arduino Uno e servomotores controlados por PID, mantendo o alvo no enquadramento.
Detalhes técnicos, números do dataset e metodologia constam no relatório do projeto.
.png)